Thank you for the resources! I would like to share progress on setting up CAN communication on the BeagleBone Black (BBB) using Linux. I have successfully completed both the hardware setup and initial communication tests using the onboard DCAN controllers.
- Hardware Setup
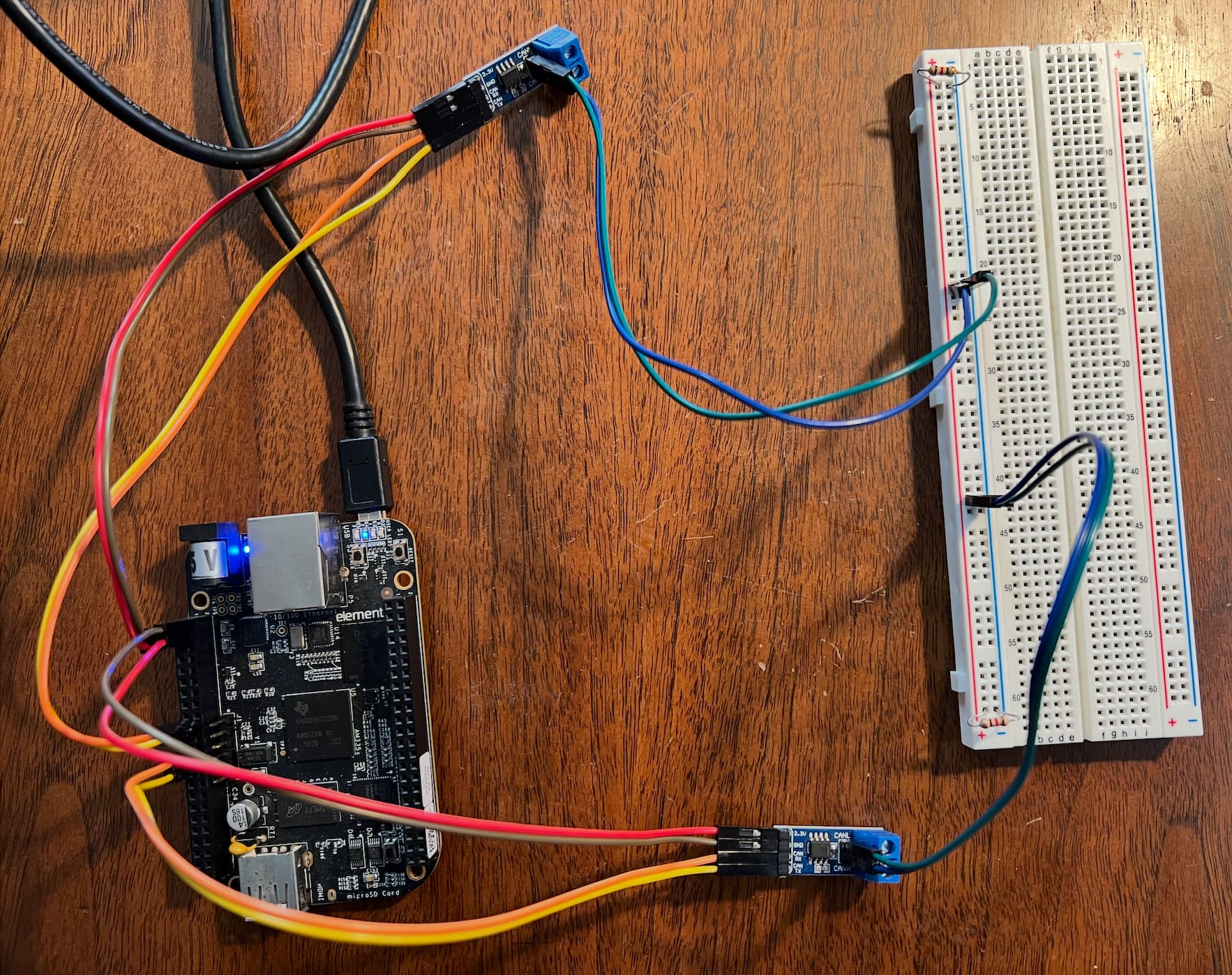
I configured a minimal CAN network on a single BBB using both DCAN interfaces.
DCAN1 (P9.24 / P9.26) is connected to one CAN transceiver.
DCAN0 (P9.19 / P9.20) is connected to another CAN transceiver.
The CANH and CANL lines from both transceivers are connected together to form a shared CAN bus.
Two 120 ohm termination resistors are placed across CANH and CANL.
This setup allows the BBB to simulate two CAN nodes on the same physical bus.
- Linux Configuration
I enabled CAN functionality using pin multiplexing:
config-pin p9.24 can
config-pin p9.26 can
config-pin p9.19 can
config-pin p9.20 can
Both CAN interfaces were brought up using the same bitrate:
sudo ip link set can0 up type can bitrate 125000
sudo ip link set can1 up type can bitrate 125000
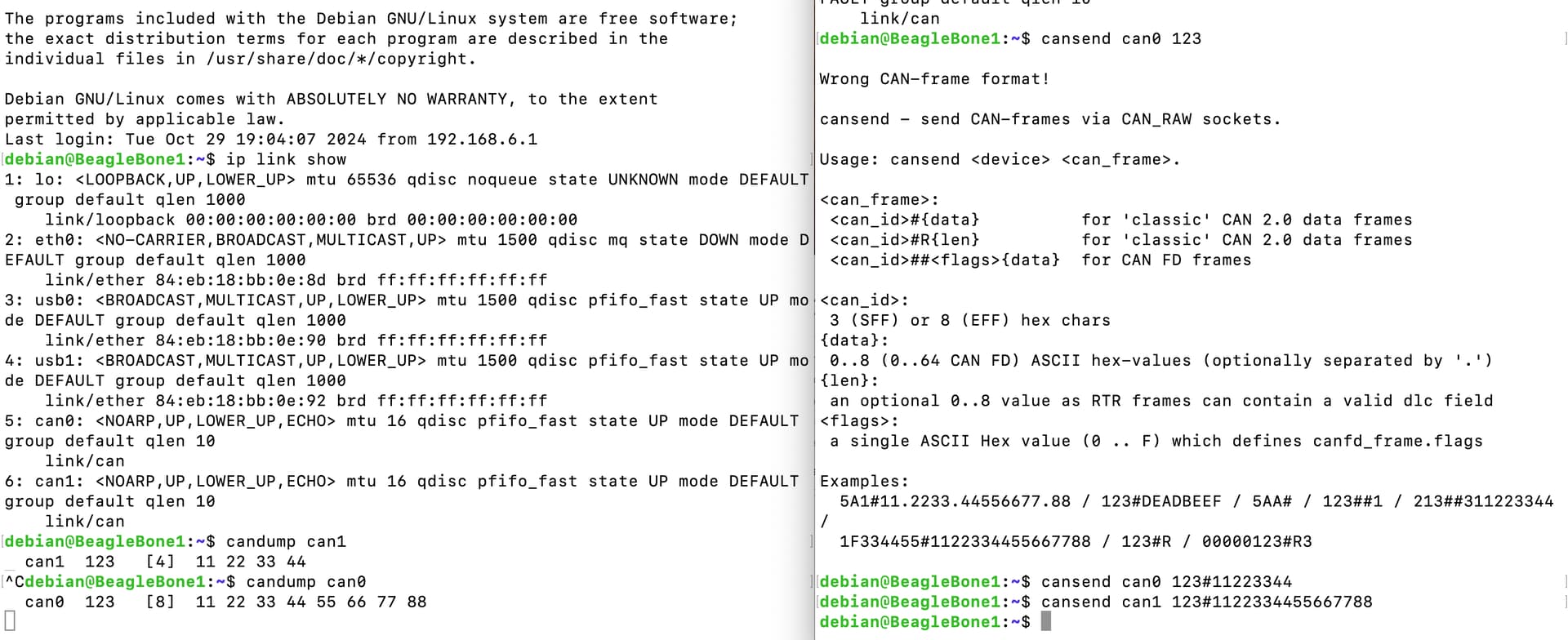
I verified that both interfaces are active using:
ip link show
The output shows that both can0 and can1 are in the UP state.
- CAN Communication Test
I performed bidirectional communication tests between can0 and can1.
Test 1: can0 to can1
In terminal 1:
candump can1
In terminal 2:
cansend can0 123#11223344
The message was successfully received on can1.
Test 2: can1 to can0
In terminal 1:
candump can0
In terminal 2:
cansend can1 123#1122334455667788
The message was successfully received on can0.
- Screenshots
I have attached screenshots showing:
CAN interface status (ip link show)
Successful transmission and reception using candump
Hardware wiring on the breadboard
- Key Observations
Both DCAN controllers can operate simultaneously on a single BBB.
The SocketCAN framework and c_can driver function correctly.
Matching bitrate across nodes is required for communication. Lower bitrate generally provides more stable CAN communication, especially during initial testing and debugging. So I choose 125kbps rather than 500kbps.
Physical layer setup, including transceivers and termination resistor, is essential for stable operation.
- Next Steps
Next, I plan to study the Linux c_can driver in detail, including mailbox management, interrupt handling, and transmit/receive paths.
Also study the CAN stack of RTEMS. Think how to add driver on BBB.
Please let me know if there are any suggestions or additional tests I should perform.